Pervasive Artificial Intelligence Research (PAIR) Labs
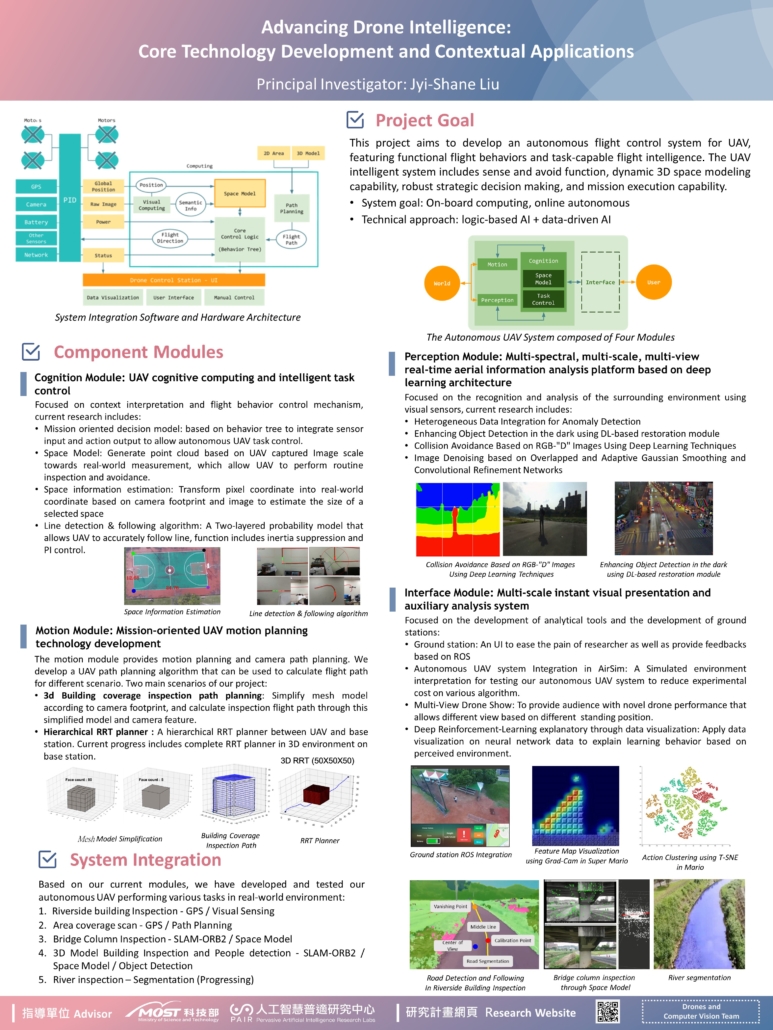
Advancing Drone Intelligence: Core Technology Development and Contextual Applications
Principal Investigator: Professor Jyi-Shane Liu
—
Summary
Our research aims to develop an autonomous intelligent control system for drones and to advance artificial intelligence components for the drone industry. The technical agenda is to establish intelligent drone control techniques by advancing from basic-level intelligent flight to more complex adaptive flight. This includes sense-and-avoid, dynamic space modeling, and robust adaptation for mission control. The project is composed of four functional modules. The cognition module is responsible for situation awareness and decision-making. The motion module provides motion planning and camera path planning. The perception module develops sensory analysis and recognition algorithm. The interface module supports data visualization and human-machine interaction with task control user interface. All modules contribute to a common knowledge model that includes space, mission, and self-status. A standard communication and interaction protocol ensures stable growth of system functions.
Keywords
Autonomous Intelligent Drone, Intelligent Flight Control, Mission Intelligence, Drone Applications, Artificial Intelligence, Robotics, Computer Vision, Computer Graphics, Real-Time Intelligent System, Deep Learning
Innovations
- An autonomous intelligent control system framework aims to integrate sensory recognition, flight behavioral control, path planning and user interface. This framework serves as an integrated architecture so as to incorporate related technical advances according to customized needs.
- By combining traditional computer vision techniques and neural networks approaches, we aim to develop a series of visual recognition algorithms and models specifically for drones to be able to execute missions autonomously in various designed scenarios.
- A path planning algorithm that can be used to calculate flight path and provides path correction when a drone deviates from intended route.
- Mission-oriented ground control station to support researchers and users to monitor the drone’s behavior during mission execution.
Benefits
- Many research focused on advancing specific functionality of drone. However, technical validation with drones require software/hardware integration and safety measures. The autonomous intelligent control system, contributed by this project, serves as an integrated robotic framework that can incorporate and replace individual functional modules. This may benefit researchers who need to test a developing algorithm but lacks other system components to actually validate its performance in the real world.
- The ground control station accelerates research by visualizing important information related to performance evaluation. The ground control station also aims to provide safety measures and alert when researchers fail to notice unexpected events that could cause accidents.
- Visual recognition capability specific for UAV is essential towards the autonomous intelligent system. Various technical methods for different use cases provide a much wider option for different types of mission.
{kind=link}