人工智慧普適研究中心 PAIR Labs
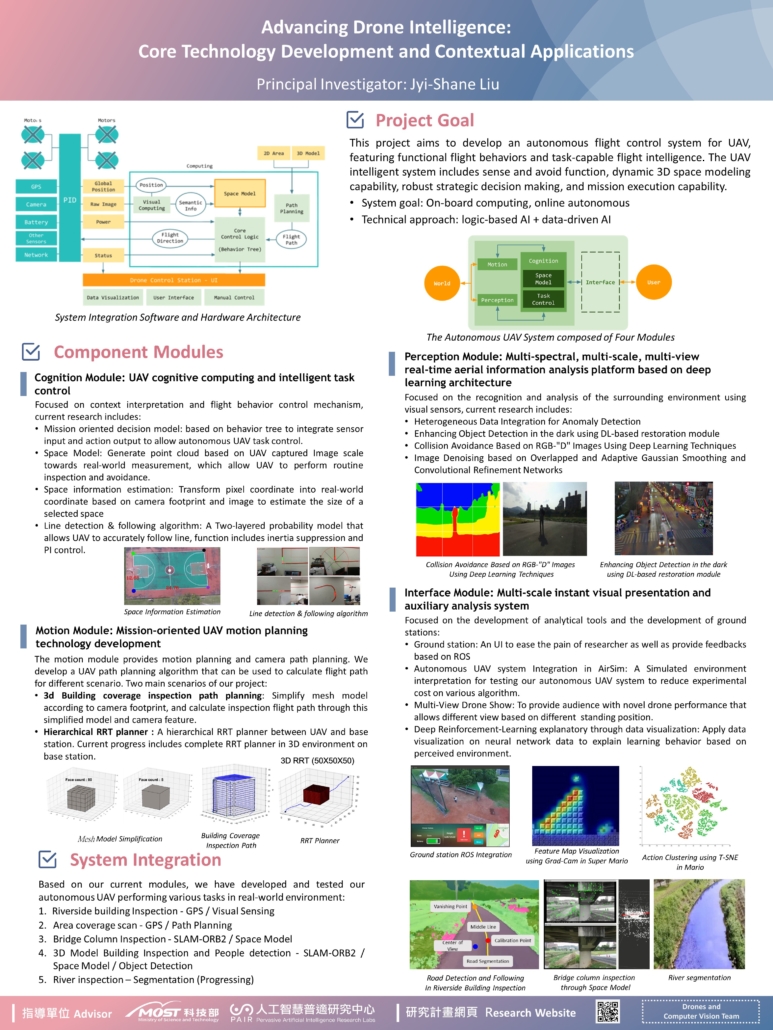
前瞻無人機智慧系統:核心技術研發與情境應用展示
計畫主持人:劉吉軒教授
概要
本計劃的研究重點為無人機開發自動智慧控制系統,並為無人機產業提供先進的人工智慧模組,將研究從基礎智慧飛行進展到更複雜的自動調適飛行來建立智慧無人機控制技術。計劃研究範疇包括感知和避障、動態空間建模以及針對任務控制的穩定調適。本項目由四個功能模組組成:認知模組負責情境意識和決策控制、 運動模組提供運動規劃和相機路徑規劃、感知模組開發感知分析和識別算法、介面模組支持資料視覺化以及任務控制導向的人機互動介面。 所有模組都有助於建構空間、任務和自我狀態的共同知識模型,各模組間標準的通信協議可確保系統功能的穩定增長。
關鍵字
智慧無人機、智慧飛行控制、無人機應用、機器人、電腦視覺、電腦圖學、即時性智慧系統、深度學習
創新
- 自主智慧控制系統框架旨在整合感知識別、飛行行為控制、路徑規劃和使用者介面。 該框架用作整合架構,以便根據客製化需求結合相關前瞻技術。
- 通過結合傳統的電腦視覺技術和神經網路方法,開發一系列專為無人機設計的視覺識別算法和模型,以期能夠在各種場景中自主執行任務。
- 開發路徑規劃演算法,用於計算飛行路徑並在無人機偏離預定路線時提供路徑校正。
- 任務導向的地面控制站,支持研究人員和用戶監控無人機在任務執行期間的行為。
效益
- 許多研究都致力於推進無人機的特定功能,但是無人機的技術驗證需要軟硬體整合和安全措施,藉由本計劃的自主智能控制系統作為一個整合性機器人框架,可以整合和替換各個功能模組。將有益於需要測試開發算法,但缺乏其他系統組件來實際驗證其在現實世界中之性能的研究人員。
- 地面控制站利用視覺化與績效評估等相關的重要訊息來加速研究。同時,地面控制站還提供安全評估,並在研究人員未發現可能導致事故的意外事件時發出警報。
無人機特有的視覺識別能力對自主智慧系統至關重要,本系統針對不同使用場景整合各種技術方法,為不同類型的任務提供了更廣泛的選擇。
{kind=link}