人工智慧普適研究中心 PAIR Labs
Smart Drones之AI平台開發 – 智慧飛行控制
計畫主持人:莊仁輝教授
摘要
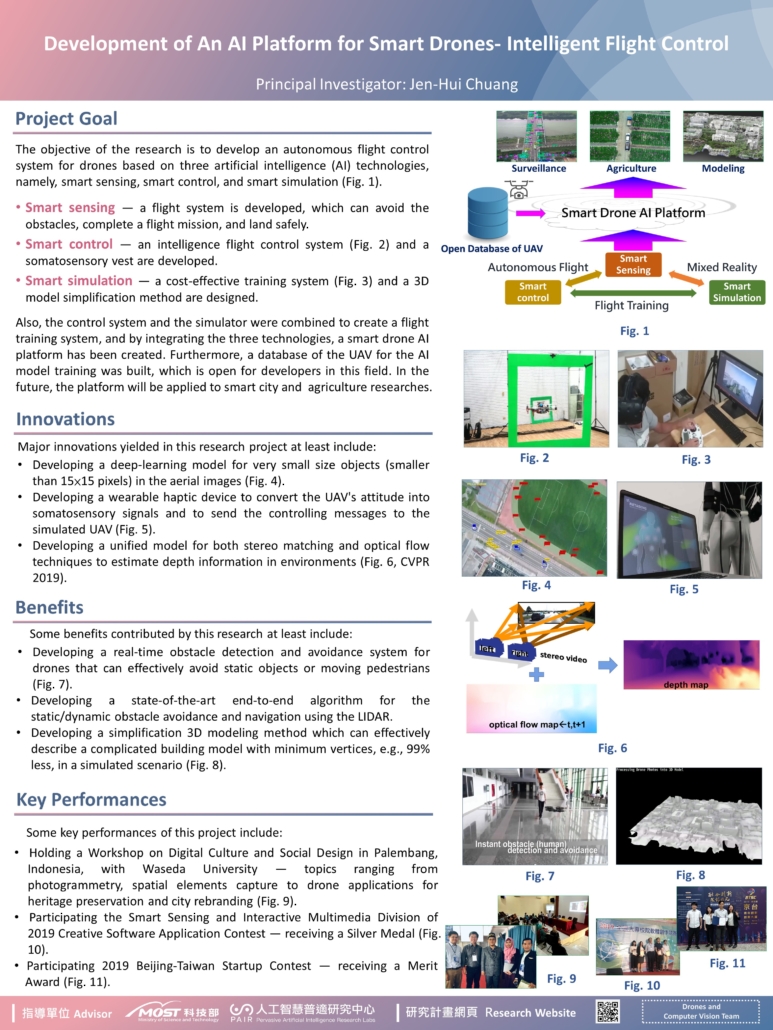
本研究的目的是為無人機或無人駕駛飛行器(UAV)開發自主飛行控制系統。我們透過電腦模擬器和實體無人機開發並測試控制系統。該系統旨在閃避空中任何障礙,完成飛行任務,並安全降落。為了經濟與時間效益,我們建立了一個可以反饋與接收體感回饋的飛行模擬器,並基於真實環境創建了3D模型,以便在模擬器上訓練飛行控制系統。除了自動飛行控制外,我們還研究精確定位、導航和著陸的控制等技術。計劃在模擬環境中訓練完成自主飛行控制系統後,轉移到真實無人機上。本研究的另一個挑戰是研究模擬環境與真實戶外環境之間的實質差異。
關鍵詞
無人機、智慧無人機、智慧感測、智慧控制和智慧模擬、深度學習
技術創新
- 世界首創針對空拍影像之停車位偵測的網路架構,能快速分析與辨識停車場中尺寸小於15×15像素的停車空位。
- 結合障礙物偵測與深度預測於單一深度學習架構內,並且能即時執行。
- 經過跨領域和跨任務學習的飛行控制訓練,模擬環境中的訓練結果有望直接應用於實際情境。
- 世界首創第一個使用LIDAR作動態與靜能障礙物迴避與導航的無人機。
- 開發一種穿戴式觸覺設備,該設備可將遠程無人機的飛行和感測器信息轉換為體感信號,協助飛手進行飛行控制。
效益
- 為無人機開發了一種即時障礙物偵測與避障系統,可有效避開靜止物體與移動行人。
- 建立世界上第一架無人機擬真飛行模擬器,結合了遙控器、AIRSIM模擬器和VR技術,提供專業和業餘飛手一個不必考慮電量與設備損壞等問題的良好模擬環境。並且能收集各種模擬飛行數據。
- 開發遠程觸覺和感應套裝(RETASENS)的原型,透過增強和重新映射無人機駕駛的人體感知去察覺無人機的飛行姿態和感測器信號。
- 發表了兩篇國際期刊論文和13篇國際會議論文(包括一份關於深度估算的CVPR論文,該論文在KITTI排行榜上,佔據排名第一名長達8個月)
{kind=link}