人工智慧普適研究中心 PAIR Labs
基於人工智能融合技術集成多元環境感測的導引及巡邏機器人
計畫主持人:曾煜棋教授
摘要
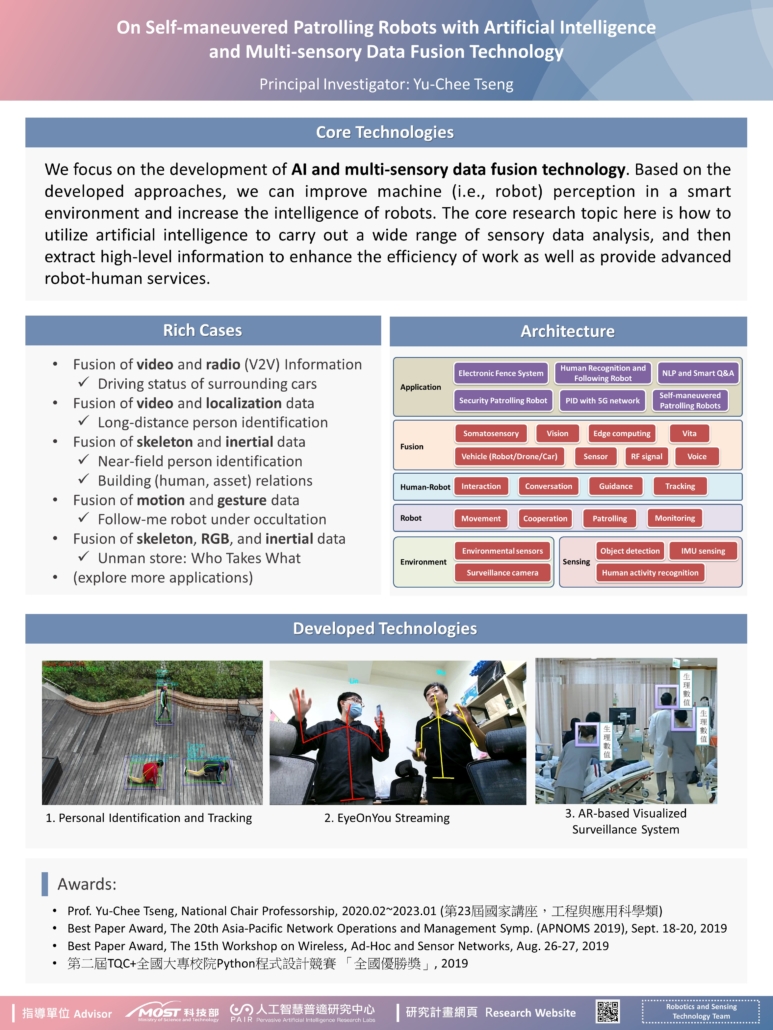
在這個研究計畫中,我們專注於結合AI與多感測資訊之融合技術的發展。經由本團隊所開發的技術,我們可以改善機械設備(例如機器人)在環境中的感知能力,可增加機械的智慧。本研究的核心主軸是,如何利用人工智慧進行廣泛的感測數據分析,從中萃取出高階特徵資訊來提升工作效率,進而提供優良的人機服務。即使沒有捕獲人員的生物特徵資訊,我們所提出的系統也能夠識別環境中的人員資訊。
關鍵字
圖像識別,深度學習,室內定位,慣性感測器,感測器融合,機器人,ROS。
技術創新
- [超視覺] 監控攝影機(RGB)與定位技術的融合。
- 我們設計一種配對機制,將人物資訊與身上所配戴的感測ID進行結合。PID(人員識別)的分析結果會在螢幕上顯示,讓使用者彷彿具有看穿畫面的能力,可在畫面中得知人員的身分。本研究亦建立一套雛型系統,並進行了大量實驗來驗證本系統的正確性。
圖1.監督的人員識別系統架構(左)和結果(右)。
- [第三隻眼] 融合深度攝影機(RGB-D)和慣性感測器數據。
- 利用穿戴式裝置和深度攝影機開發人物識別系統。深度攝影機可以捕獲人的骨架數據。使用者身上配戴的穿戴式裝置具有慣性感測器,可以捕捉用戶的動作。收集人物的骨架和慣性數據並將其傳輸到我們的融合服務器進行分析,可將每個慣性數據與人物骨架配對,讓使用者可以直接看穿畫面中的人物骨架與感測資訊之間的對應關係。
圖2.第三隻眼的人物識別系統結構(左)和結果(右)。
成果效益
- 超視覺:通過融合監控攝影機與定位技術,我們可以在遠距離的監控畫面實現人物識別。
- 第三隻眼:融合深度攝影機與穿戴式裝置的資訊,實現短距離、高精準度的人物識別。
- 其他正在進行的研究
- 採用其他團隊所開發的機器人(國立師範大學王偉彥教授),結合本團隊所開發的人員識別技術,使機器人能夠追蹤特定的使用者。圖3為追蹤機器人的架構。
{kind=link}